Project Description
LogisticAnn is a personal project/memo developed with the goal to thoroughly study Neural Networks along with Backpropagation and a plethora of gradient based optimization techniques used in the field. During this journey, we will also derive all the formulas and implement the ensemble in a python class called LogisticAnn. The longer goal is to learn the mathematics underlying Neural Networks enough to be able to design and implement bespoke solutions adapted to specific problems as needed. In addition, this memo will serve as a reference point for upcoming projects.
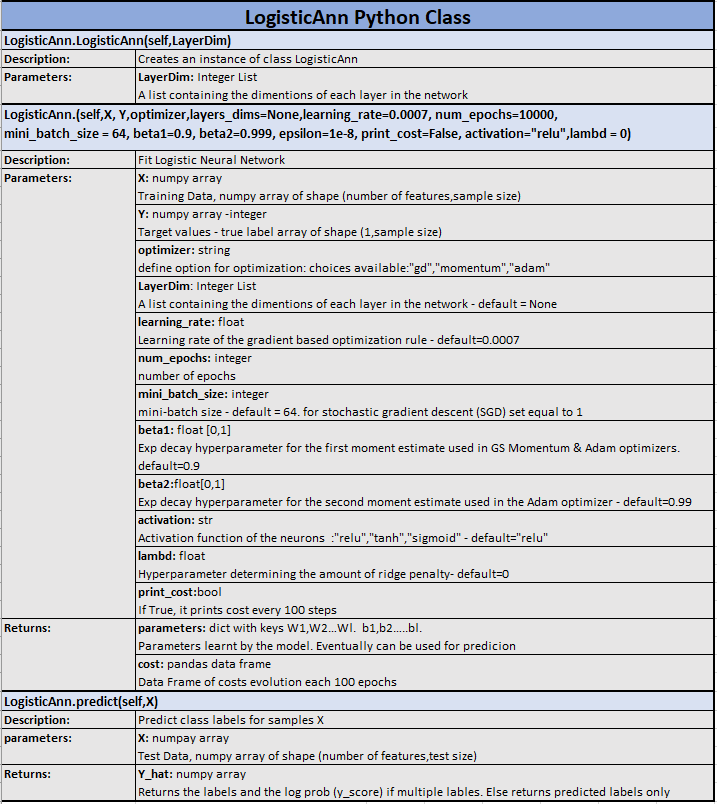
Documentation
LogisticAnn is a Neural Network classifier class. Please refer to the documentation below:
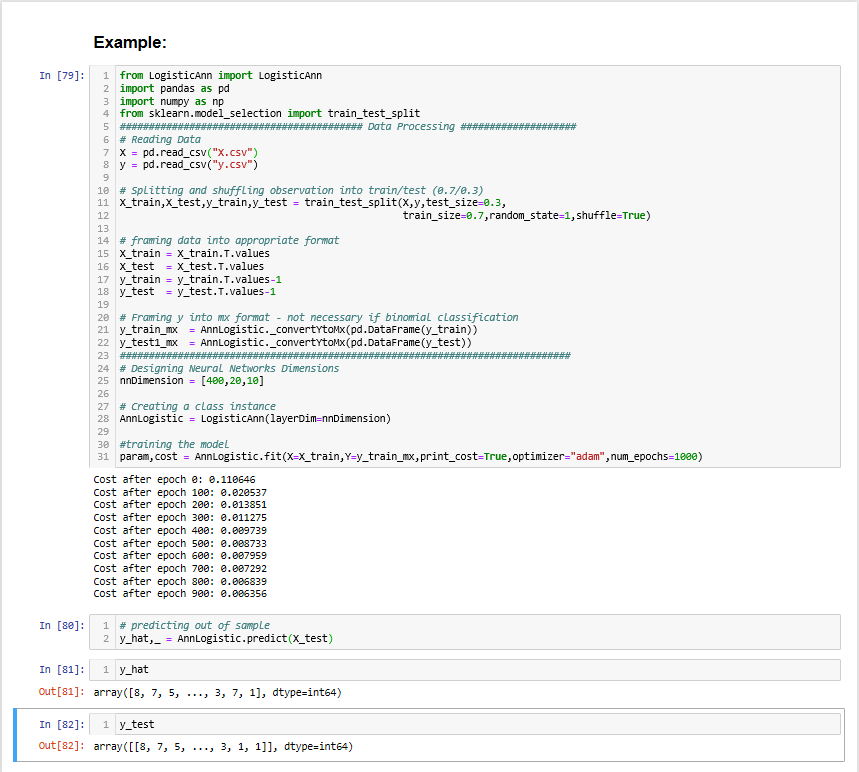
Example
Theory
Artificial neural networks or connectionist systems are computing systems inspired by the biological neural networks that constitute animal brains. Such systems “learn” to perform tasks by considering examples, generally without being programmed with task-specific rules.
Components:
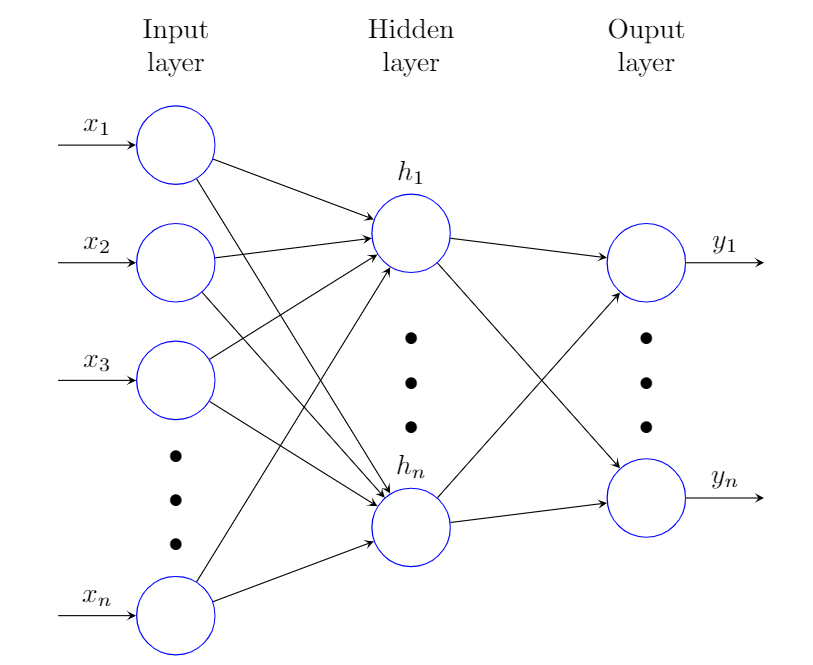
Neural Networks consist of 3 type of layers: 1. Input layer, 2. Hidden layers, 3. Output layer. In the example above it is a one-layer NN (We do not count input & output layers). Each layer consists of one or several neurons (blue circles in the diagram above) that get activated by an activation function. There are several activation functions used, in this project, our class gives the option to either use “tanh – Hyperbolic Tangent” or ” Relu – Rectified Linear Unit” functions for the hidden layers and will use the sigmoid for the output layer.
Computation:
There are four main processes envolved in the training phase of Neural Networks: Initialization, Forward-propagation, Backpropagation and Optimization.
1. Initialization:
Initialization of the weights is done once; only at the beggining of the process. The initialization process can have drastic impact on the convergence as well as the speed of the algorithm. We chose to initialize our weights such that they are normally distributed with mean 0 and variance where
is the the numbers of neurons in the previous layer. The bias unit
is initialized to 0.
More information on initialization as well as on the issues of exploding and vanishing gradients can be found here:
https://www.deeplearning.ai/ai-notes/initialization/
Initialization code:
def _initialize_parameters(self,layer_dim):
"""
Arguments:
layer_dim <- a list containing the dimentions of each layer in the network
Returns:
Parameters <- a dictionary containing parameters "W1","b1".."Wl","bl"...."WL","bL". where "L" is the number of the final output layer in the network
"Wl" - Matrix of weights of shape (layer_dim(l),layer_dim(l-1))
"bl - Vector of the bias nodes of shape (leyer_dim(l),1)
"""
np.random.seed(3) # Fixing the seed in order to get the same result (helps for debugging)
parameters = {}
L = len(layer_dim)
for l in range(1,L):
parameters["W" + str(l)] = np.random.randn(layer_dim[l],layer_dim[l-1]) * 2 / np.sqrt(layer_dim[l-1])# the purpose of the perturb is to make the initialized weights very close to 0
parameters["b" + str(l)] = np.zeros((layer_dim[l],1))
# Just to make sure that each weight and bias matrix is of the appropriate shape
assert(parameters["W" + str(l)].shape == (layer_dim[l],layer_dim[l-1]))
assert(parameters["b" + str(l)].shape == (layer_dim[l],1))
return parameters
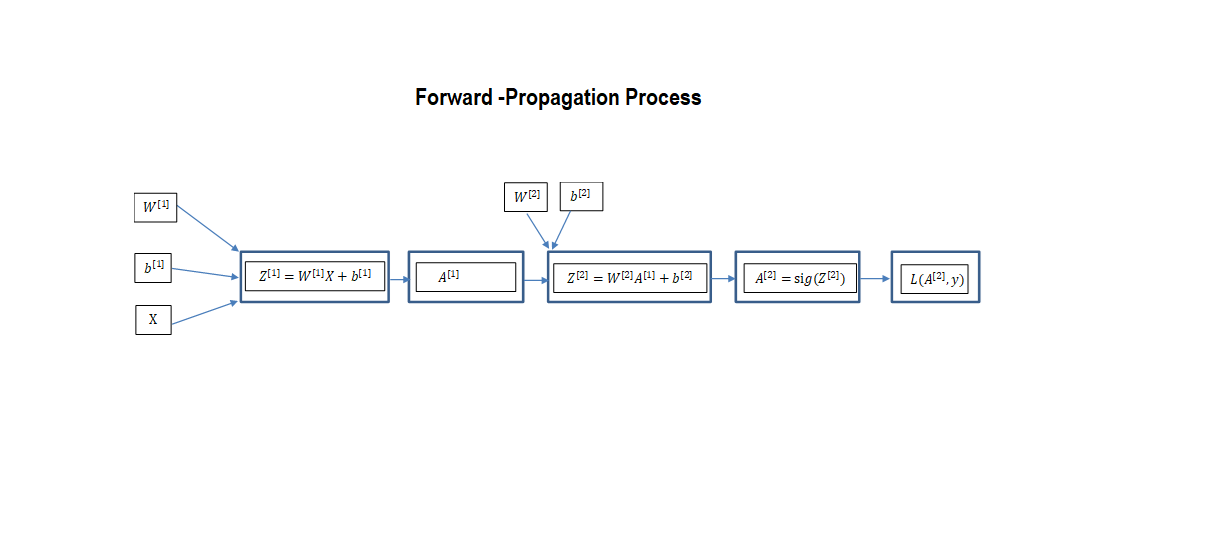
2.Forward Propagation:
The forward propagation algorithms’ task is to propagate the information forward from the input to the output layers using a combination of two functions of which one is linear, the second is the activation function. The algorithm describing the forward propagation process for a one hidden layer network is as follow:
The method responsible to propagate information from layer to layer is described below:
def _forwardProp(self,A_prev, W, b, activation):
"""
Implementation of the forward propagation algorithm
Arguments:
A_prev <- The activation matrix results of the previous layer of shape (number of nodes in the previous layer, m)
W <- Matrix of weights of the current layer of shape (number of nodes in the current layer, number of nodes in the previous layer)
b <- Matrix of bais units of the current layer of shape (number of nodes in the current layer,1)
activation <- The activation function used to activate the current layer. stored as a text string: "sigmoid","relu" or "tanh"
Returns:
A <- The activation matrix results of the current layer of shape (number of nodes in the current layer, m)
cache <- a tuple containing (A_prev,W,b,Z)
"""
Z = np.dot(W,A_prev) + b # the linear activation
if activation == "sigmoid":
A = self._sigmoid(Z)
elif activation == "relu":
A = self._relu(Z)
elif activation == "tanh":
A = np.tanh(Z)
cache = (A_prev,W,b,Z)
return A,cache
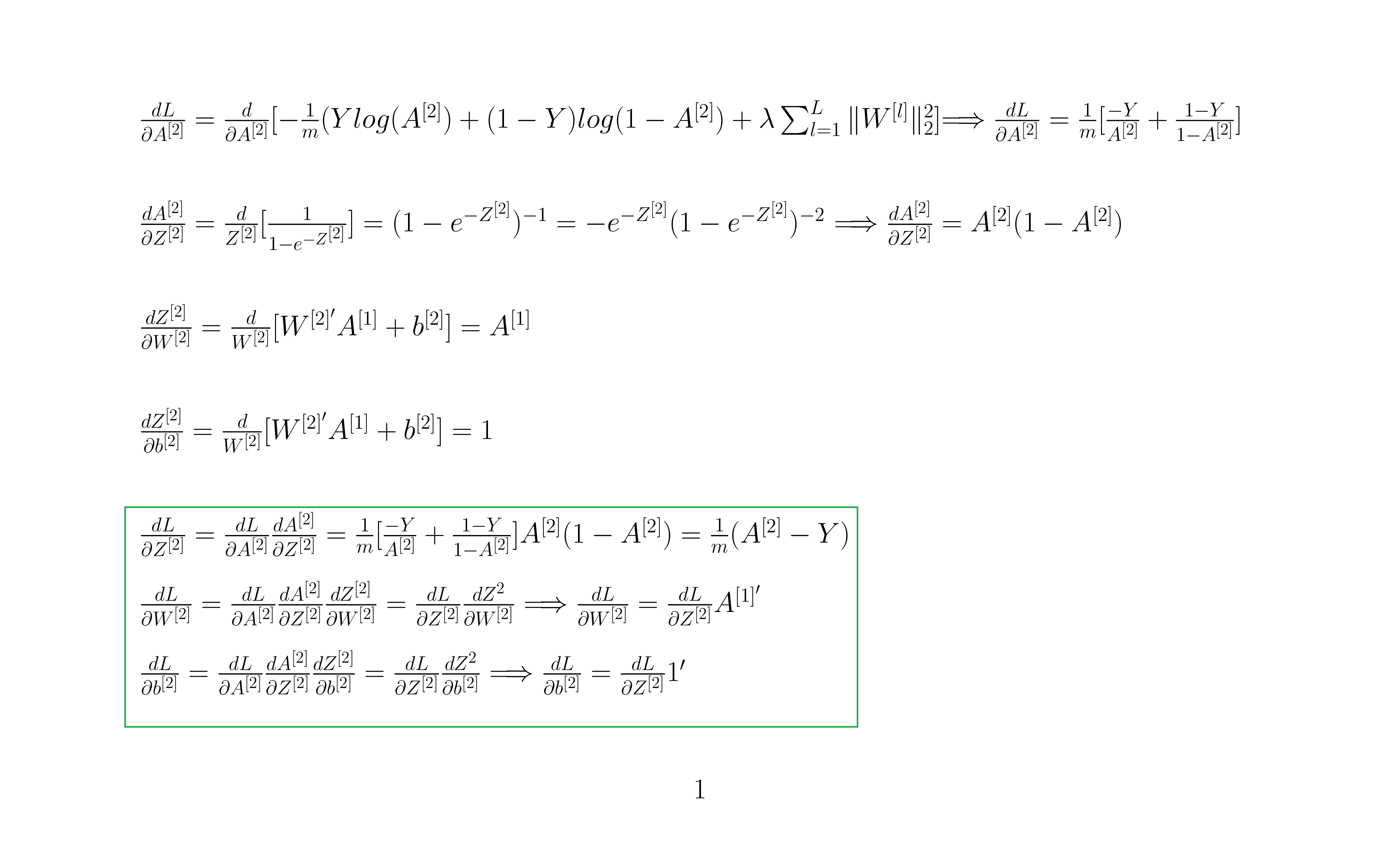
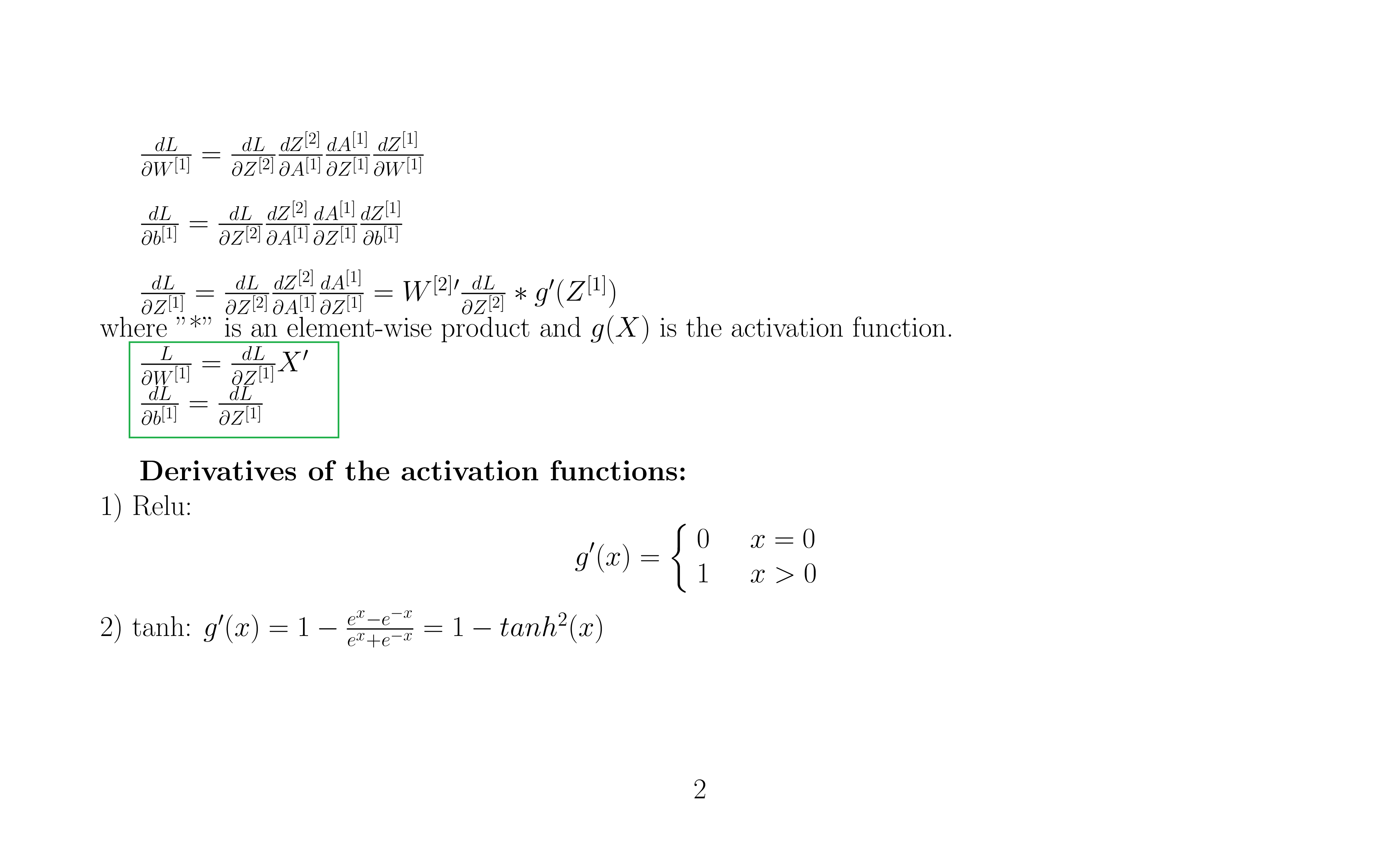
3.Backpropagation:
Backpropagation “Backpropagation of errors” is algorithm used in the training process of Neural Networks. It is based on the chain rule od derivative calculus and helps us calculate the gradients of the target variables (W,b) with respect to the Loss function L.
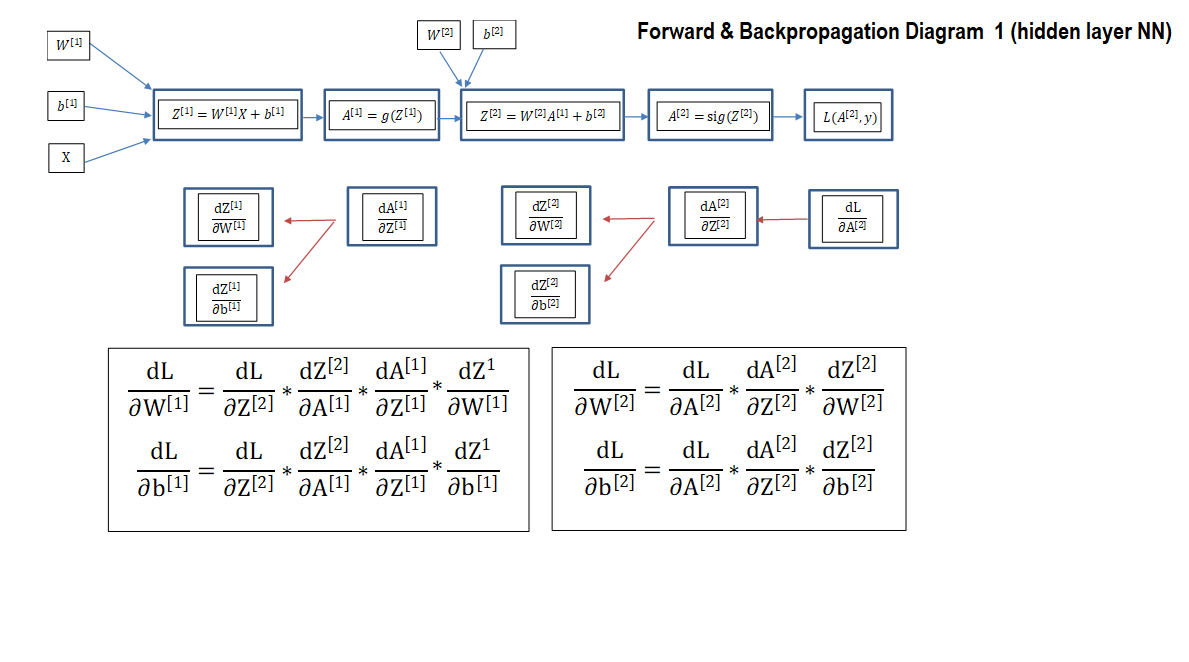
Gradients Calculation:
Backpropagation snippet:
def _backProp(self,dA,cache,activation):
"""
Implement the backward propagation using linear backprop function.
Arguments:
dA <- post-activation gradient for current layer l
cache <- a tuple containing (A_prev,W,b,Z) of the current layer
activation <- the activation to be used in this layer, stored as a text string: "sigmoid", "relu" or "tanh"
Returns:
dA_prev <- Gradient of the cost with respect to the activation (of the previous layer l-1), same shape as A_prev
dW <-Gradient of the cost with respect to W (current layer l), same shape as W
db <-Gradient of the cost with respect to b (current layer l), same shape as b
"""
if activation == "sigmoid":
dZ = self._sigmoid_backward(dA,cache)
dW,db,dA_prev = self._linear_backward(dZ,cache)
return dW,db,dA_prev
elif activation == "relu":
dZ = self._relu_backward(dA,cache)
dW,db,dA_prev = self._linear_backward(dZ,cache)
return dW,db,dA_prev
elif activation == "tanh":
dZ = self._tanh_backward(dA,cache)
dW,db,dA_prev = self._linear_backward(dZ,cache)
return dW,db,dA_prev
def _L_model_backProp(self,AL, Y ,activation ,caches,lambd):
"""
Implement the backward propagation for the (relu or tanh) * (L-1) -> LINEAR -> SIGMOID last layer L
Arguments:
AL <- probability vector, output of the forward propagation (L_model_forwardProp())
Y <- true "label" target variable in the supervised learning problem size (1,m)
Activation <- the activation to be used in the hidden, stored as a text string: "relu" or "tanh"
caches <- list of caches containing all caches for each layer. each cache is a tuple containing (A_prev,W,b,Z)
Returns:
grads -- A dictionary with the gradients
grads["dA" + str(l)] = ...
grads["dW" + str(l)] = ...
grads["db" + str(l)] = ...
"""
grads ={}
L = len(caches) # The number of layers
m = AL.shape[1] # number of training examples
Y = Y.reshape(AL.shape)
epsilon = 1e-7
# Starting back propagation by computing dAL given a sigmoid activation function for the last layer L
dAL = np.divide(-19 * Y,AL+epsilon) + np.divide((1-Y),(1-AL)+epsilon)
# retrieving the cache tuple of layer L
cache_L = caches[L-1]
_, W, _,_ = cache_L
# getting the gradient of layer L
grads["dW"+str(L)],grads["db"+str(L)],grads["dA"+str(L-1)] = self._backProp(dA=dAL,cache = cache_L,activation="sigmoid")
grads["dW"+str(L)] = grads["dW"+str(L)] + (lambd/m) * W
#loop from l=L-2 to l=0 to calculate the rest of the gradient through each layer
for l in reversed(range(L-1)):
cache_l = caches[l]
_, W, _,_ = cache_l
dW_temp,db_temp,dA_prev_temp = self._backProp(grads["dA"+str(l+1)],cache_l,activation)
grads["dA"+str(l)] = dA_prev_temp
grads["dW"+str(l+1)] = dW_temp + (lambd/m) * W
grads["db"+str(l+1)] = db_temp
return grads
4. Optimization:
We provided three options for the optimization process: Mini-Batch Gradient Descent, Mini-Batch Gradient Descent with Momentum and Mini-Batch Adaptivemoment Estimation (Adam).
Gradient Descent (GD):
Is a classic algorithm in machined learning where the weights simultaneously updated as follow:
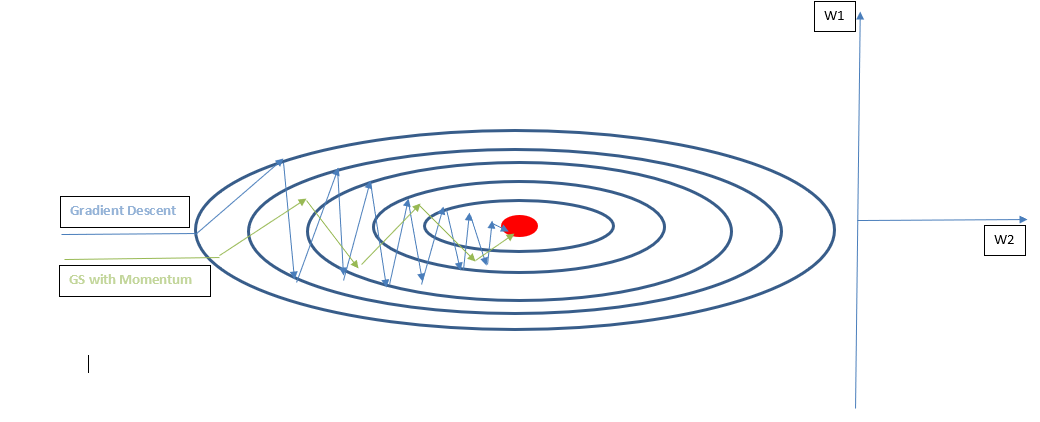
The main issue with the GD algorithm is that it is slow to converge due to unnecessary oscillations (Not in the direction of the optimal point) Please refer to diagram bellow:
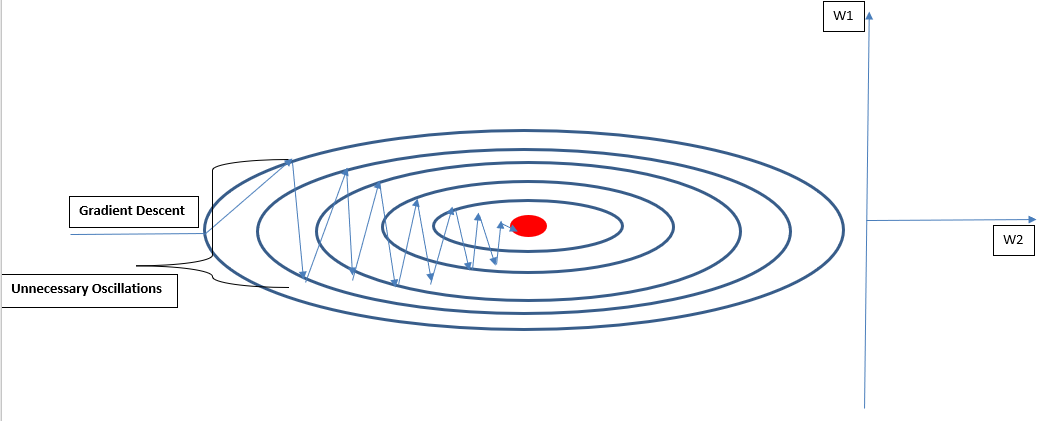
Gradient Descent With Momentum:
The Gradient Descent with Momentum is a modified Gradient Descent in which the weights are updated using the exponential weighted average of the gradients instead of using the gradients directly. The intuition behind is to reduce the vertical unnecessary oscillations (illustrated in the plot bellow) and get a faster learning in the direction of the optimal point, which results in faster convergence. The weights are updated using the following equations:
Where is a new Hyperparameter to estimate. It is common to have
by default. The chart below illustratively compares the training phase with Gradient Descent vs. Gradient Descent with Momentum.
Adaptive Moment Estimation (ADAM):
Adam algorithm is a combination of GD with momentum and the RMSProp algorithms and serves the same purpose as GD with momentum which is increasing learning speed towards the optimal weights. The weights are updated as follow:
Averaging Bias Correction:
Where and
are additional hyperparameters.
Updating Weights: